At IDLab, we leverage wireless communication links for localisation and tracking Internet of Things devices, and for sensing the environment. Since our targeted IoT applications are typically using power constrained sensors or asset trackers, our research is often on energy aware localisation and tracking. Hence, we are targeting the perfect trade-off between application requirements, localisation accuracy and energy usage.
We have identified three distinct topics, that focus on use-case specific trade-offs:
- Multimodal Localisation & Tracking: Combining multiple technologies to support a wide variety of use-cases and environments in a single device.
- Device Free Sensing: Sensing where people are located, without equipping them with a tracking device.
- Context-aware Localisation & Sensing: Improving location estimates of classic systems by taking into account context information of the device.
Research examples
- Multimodal Localisation & Tracking: We use whatever wireless communication technology is available on the device and in the environment to provide the best suitable location estimate depending the application. When inside, we can use private networks such DASH7, Bluetooth, Wi-Fi or UWB. When outsides, we can use GNSS if both the signal and the required power is available; otherwise, we resolve to LoRaWAN, Sigfox, NB-IoT or cellular based localisation.
- Device Free Sensing: We estimate the location of people or the size of groups of people without requiring a connection with their devices or requiring them to carry any device at all. We either use a network of wireless devices that we install in the environment, or sense (without processing) signals that are available in the area anyway, such as cellular or Wi-Fi. One of our typical testing environments are festivals or other large gatherings, where we estimate the size of the crowd. However, we are also estimating smaller numbers of people or even the location of individuals in city or office environments, either by our own wireless sensor network or by passively processing the ubiquitous wireless signals in the environment.
- Context-aware Localisation & Sensing: We leverage information that we have about the environment to improve location estimates. For example, when we know that a car will drive into a tunnel, we make sure that location updates are calculated by 5G or Wi-Fi 802.11p roadside units. Or we use the constraints posed by shipping containers to enable self-localisation of wireless devices attached to those containers.
-
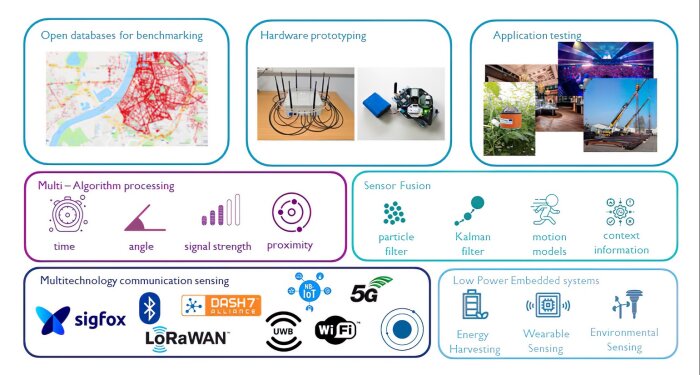 An overview of the typical technologies and techniques which are used by our researchers.
An overview of the typical technologies and techniques which are used by our researchers.

Involved faculty
Maarten Weyn
