For an intelligent agent to interact with its environment, awareness of the context and changes in context over time is crucial. In this research track, we research sensor fusion and transfer learning methods for time series data, ranging from sensor data in industrial applications to video and LIDAR streams in autonomous systems. An example is our research on object, person and position detection, applied in application domains such as autonomous shipping.
A problem often encountered in practice, however, is that sensors do not always provide a reliable source of information. Various types of noise could negatively affect the quality of the input data, causing our machine learning models to fail. This noise can have various sources including the hardware design (e.g., interference) or the environment (e.g., poor visibility due to fog or rain). To make perception systems more robust, we make the intelligent agents context-aware by taking into account the data quality. By assessing the quality of the input data and analysing the propagation of noise throughout the model we can evaluate the reliability of a machine learning model in a specific context. This allows us to dynamically select the most suitable sensor modalities or machine learning model implementation for each specific situation, leading to more robust perception and improved decision making.
Research examples
- In imec.ICON Smart Waterway project camera and LIDAR data are combined to detect, localize and track other vessels and obstacles in the waterway to enable autonomous navigation. In Blauwe Cluster ICON SSAVE, we take perception one step further and share information between multiple vessels, taking into account the relevance of the external data, as well as the data quality to obtain an extended view on the vessel’s environment.
- As part of our research in automotive and industrial applications, IDLab researches event and anomaly detection in time-series data using machine learning to detect anomalies. In the Celtic-Next SARWS project, for example, machine learning is used to detect road-weather conditions from vehicle data streams.
-
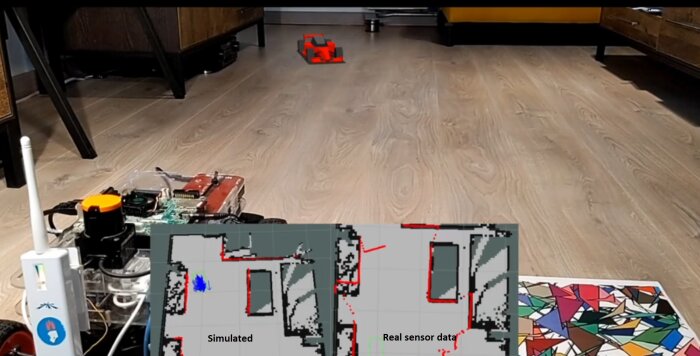 With hybrid simulation we connect physical test beds with virtual agents, to virtually scale-up physical testing environments. This allows validation of complex interactions between agents in a safe way.
With hybrid simulation we connect physical test beds with virtual agents, to virtually scale-up physical testing environments. This allows validation of complex interactions between agents in a safe way. -
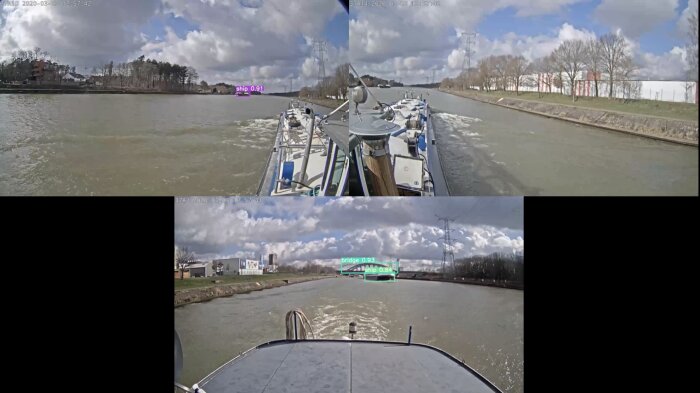 In the context of SmartWater we are working towards autonomous vessels on our in-land waterways. We focus, among others, on simulation-based learning and real-world navigation and obstacle detection.
In the context of SmartWater we are working towards autonomous vessels on our in-land waterways. We focus, among others, on simulation-based learning and real-world navigation and obstacle detection.




